系统介绍
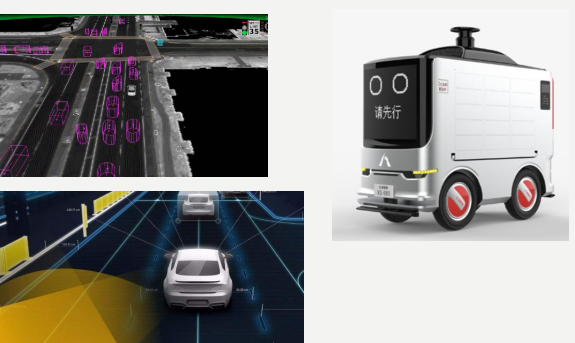
传统无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。它利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物。
长沙兴特通用电气有限公司利用多种传感器数据实现移动机器人的实时准确定位、安全避障。传统的技术依靠铺设磁条、激光反射板等辅助,进行导航定位,但是这些方法导致了高昂的场地改造成本、无法变更路线等问题。而我们所开发的视觉定位导航技术解决了这些行业难题,可以直接应用于自然环境,无需现场改造。关键技术包括定位技术、视觉实时定位技术、视觉伺服控制技术、视觉智能避障技术。
功能介绍
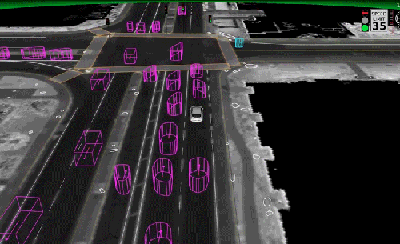
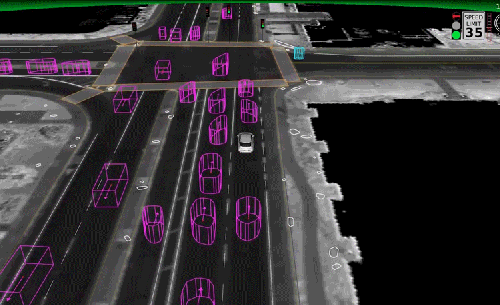
利用激光扫描仪,以及机器视觉实现对现场周围环境的实时扫描以及建模,能够及时躲避障碍物,进行路线规划,同时基于FPGA的视觉处理算法,大大提升了算法的实时性,以及对复杂环境的适应性。
每台AGV小车的控制系统中通过编程存有全部的运行线路和线路区段控制的信息,AGV小车只需知道目的地和到达目的地后所需完成的任务,就可以自动选择最优线路完成指定的任务。这种方式下,AGVS中使用的主控计算机可以比较简单。主控计算机与各AGV车载计算机之间通过通信装置进行连续的信息交换,主控计算机可以实时监控所有AGV的工作状态和运行位置。
产品特点优点
1、不依赖卫星导航系统,通过自身对周围复杂环境的智能感知、大数据分析而进行智能决策和车辆控制,产品具有更好的系统稳定性和隐蔽性,在实际民用中更具智能性,同时具有广阔军用前景。
2、利用多种传感器融合技术实现基于机器视觉和深度学习的环境感知,实现对车辆的精确控制,安全驾驶,完成自动配送货,车联网等功能。
3、按车辆使用需要进行嵌入式设计,可直接用于车载环境。
4、提供SDK软件,供客户做二次开发。
5、根据客户需求,针对特定场景提供完整的智能驾驶应用解决方案。